400-820-6913
在線咨詢
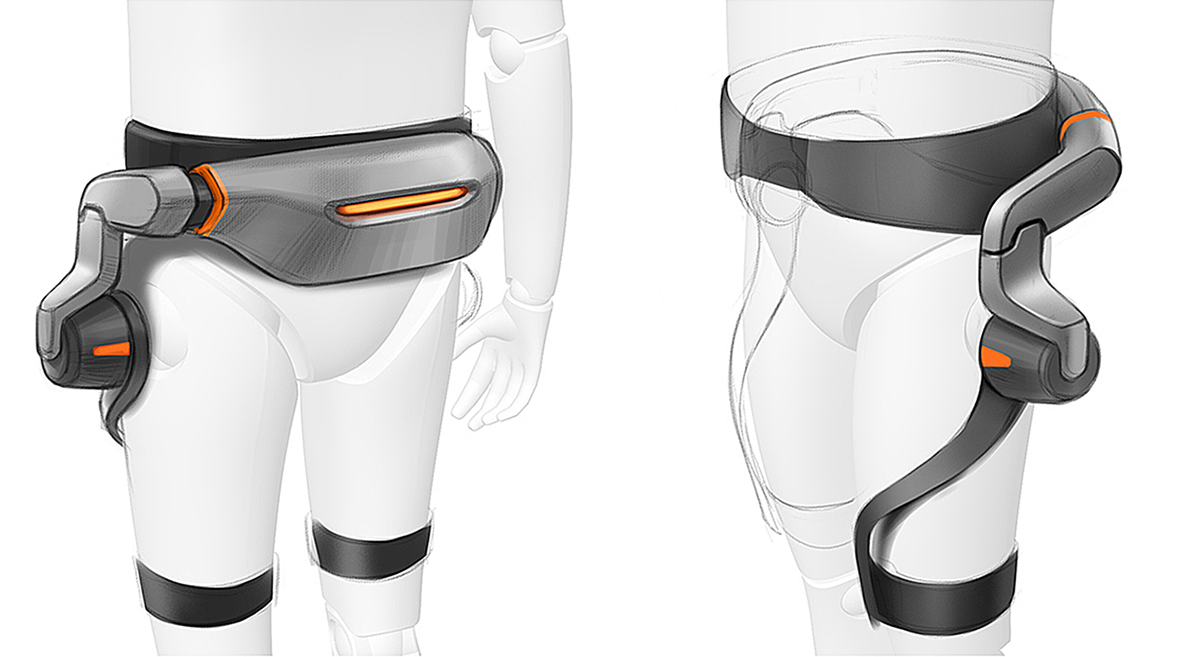
隨著生存環境的惡化,醫療康復類機器人產品創新日益成為當下關注的熱點。該外骨骼機器人首次采用柔性關節驅動的技術,當用戶穿上它,不會感覺被硬殼束縛住身體,而是像自然地穿著一件“衣服”。博靈機器人此次推出的行走助力外骨骼機器人是全球唯一一款將柔性關節驅動技術…


01 背景與挑戰
上海博靈科技是一家專業從事機器人產品研發的高科技企業。創新團隊具有國際頂尖協作型機器人研發經驗,對技術的趨勢和產品的應用場景具有深刻洞察。新產品將核心關節控制技術應用于服務機器人方向,以滿足大健康領域的特定用戶需求。隨著生存環境的惡化,醫療康復類機器人產品創新日益成為當下關注的熱點。該外骨骼機器人首次采用柔性關節驅動的技術,當用戶穿上它,不會感覺被硬殼束縛住身體,而是像自然地穿著一件“衣服”。
02 梳理項目目標
當時是有兩種背景,一個背景是健身房,另一個是康復。他是測量式的外骨骼機器人,并不是助力的作用,而是一個測量人的一些狀態的機器。
比如說如果你去健身房,教練會讓你辦卡,你不一定會辦,這個時候,教練拿出這個系統,讓你穿上。然后根據ipad里面的要求做十個動作,比如平板支撐,通過這些動作來測量你的身體肌肉平衡性、協調性、持續性和耐久力等等一些特質,從而非常精確的了解到你每一塊肌肉的發力狀況,會在專門的軟件上形成透視圖,通過紅色和白色來標注每塊肌肉的發力狀況。(紅色發力非常大,白色沒發力,中間的是粉紅色),可以通過這種直白的形式表達你身體的情況,然后教練交流和具體安排一些課程,來滿足一些健身需求,比較科學的方式。
作為康復,有些康復中心比如說一些腦癱患兒或者說是下肢行動受到影響的一些病人,通過一段時間的康復,將整個康復過程的康復程度量化。比如原來肌肉的發力是多少,現在發力可以達到多少。通過這個量化的標準進一步制定更新的治療康復方案
這個東西推出之后,也在幾個健身房里面的做了幾個測試,反應非常不錯,很多健身房的辦卡率提高200%。因為消費者對于這種既有邏輯性,又在數據形成各方面非常有用的這種方式是沒有抵抗力的。整體為健身房和一些醫療臨床機構,增加了很多好的方向。
兒童輔助外骨骼助力系統,比如說先天腦癱患兒他走路的時候是扭曲的,但對他來說,這個走路是自然,如果把它掰成正常人的走路方式,對他來說反而是扭曲的,但是在外人看來了 會給人感覺相對舒服一點。還有,他習慣了扭曲方式,會導致很多的問題,包括脊柱側彎、肌肉的不平衡性。通過外骨骼機器人把它掰成一個正常的,讓他形成一種肌肉記憶,記住這樣行走的感覺,同時通過肌肉和骨骼的生長方式來代償一些不足的地方,從而讓他習慣正常的走路方法。
03 開展研究
雙鉆模型是一種結構化的設計方法,將整個設計過程分為兩個大的階段(即圖中的菱形鉆石):
鉆石一——做正確的事(Design the right thing)
鉆石二——用正確的方法做事(Design things right)
并把設計過程中的不同階段映射到這兩個大的階段中,分為四個小的具體的階段。我們在對博靈外骨骼機器人的設計中就采用了這種結構化的流程,將趨勢研究和產品設計兩個大塊提取出來進行步驟拆解,其中趨勢研究包含了縣轄下的的情感訪談、焦點小組、設計體驗地圖以及設計定義部分。通過這樣的前期準備工作完成設計的探索和定義部分。隨后就可以從容的進行設計的發展和實施階段。

04 基于研究,形成洞見
我們進行深入的市場研究、目標使用者調查、行業技術分析及使用場景分析,以發現更多的創新機會點。1. 應用場景分布 醫療康復中心和私人家庭是產品應用的兩個主要場景。通過競爭分析發現醫療康復中心多數產品偏大型化,也更加專業。 私人家庭使用的產品則更輕量化,易于攜帶使用。2. 核心技術與應用 運動數據采集和行走助力是兩款外骨骼機器人不同的功能特點。其中,行走助力外骨骼機器人采用了柔性關節驅動技術,在安全性、舒適度及人機交互層面與同類產品形成顯著代差,能夠全面提升使用者的穿戴體驗。
目標人群定位
該項目為兩類特定人群而設計:一是服務于卒中康復患者及年老體弱人群,用于康復訓練;二是面向成年人,通過大數據給出身體機能問題成因分析與風險預測,并提供個性化訓練規劃與指導。通過風格象限圖研究產品的流行趨勢,結合品牌的價值主張定義產品的發展方向。通過產品風格地圖發現,輕量化的設備大多采用有機的設計語義,產品感受更加親和。

05 設計執行與驗證
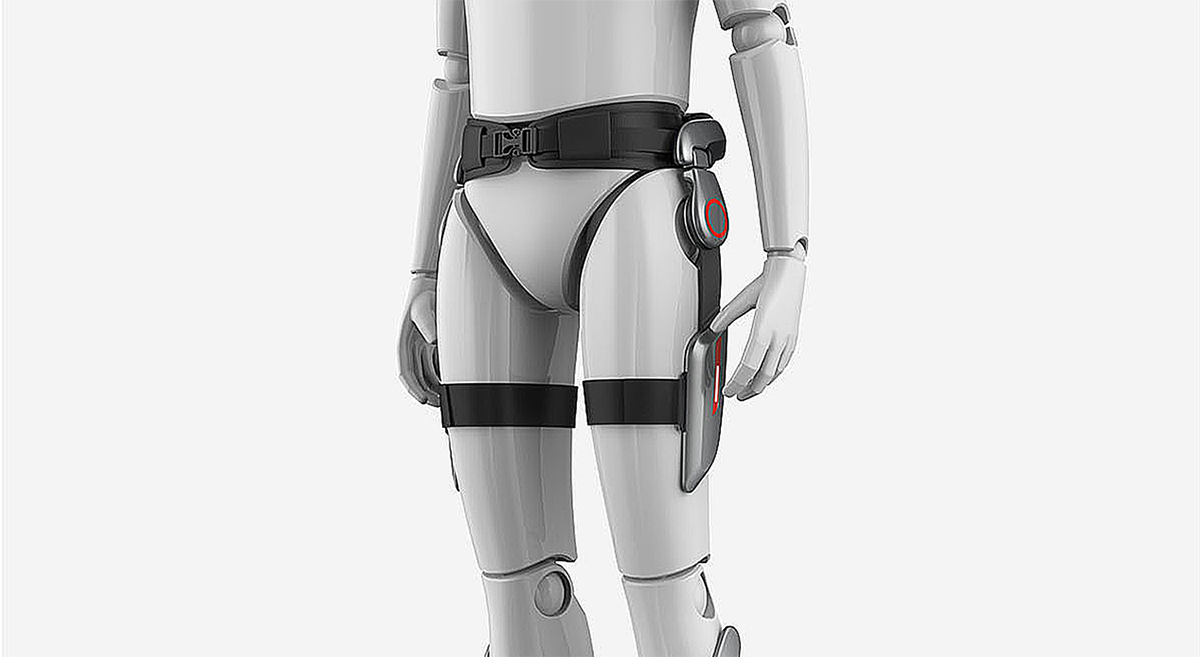
最后我們設計的兩款機器人都具有功能和外形良好結合的特點,健康管理協作外骨骼機器人,通過大數據動態分析運動表現,給出佩戴者身體機能問題的成因分析 與風險預測,并提供個性化訓練規劃與指導。健康管理協作外骨骼機器人可用于矯正錯誤的運動姿勢與方式,為患者提供更準確的康復計劃與康復輔助。產品的包裝風格延續未來感,采用抽拉的使用方式,給用戶帶來完整的使用體驗。行走助力外骨骼機器人行走助力外骨骼機器人輔助因脊髓損傷等原因致殘的患者進行獨立行走,幫助患者減輕并發癥及痛苦,使其最大限度地回歸正常生活。

06 形成結論
柔性關節驅動是美國國家科學基金會(National Science Foundation)規劃的未來十年機器人發展路線圖中,賦予機器人內生安全性、強化態勢感知,并增強人機互動能力的基礎。目前工業機器人領域中,發展最快的協作機器人門類即是基于此種技術所開創的。
博靈機器人此次推出的行走助力外骨骼機器人是全球唯一一款將柔性關節驅動技術應用在服務機器人領域的產品,將全方位改善使用者的體驗,將人與機器人的配合推向了一個新的維度。
另外,此次推出的運動數據采集外骨骼機器人,主要應用于運動健身領域。通過采集佩戴者的運動數據,可以幫助運動者更好地檢測和評估運動行為,測試運動表現和運動能力,預防運動傷害,給出個性化的運動方案指導,增強健身場景后續服務粘性。
因為功能的互補性,這兩款產品形成了一個檢測、評估、分析、建議、實時指導、主動干預的閉環。除了幫助使用者主動訓練之外,其檢測的結果能夠讓行走助力外骨骼機器人根據判斷的問題進行主動干預。從全球范圍來看,這都是一種全新且務實的嘗試。

博靈機器人此次推出的行走助力外骨骼機器人是全球唯一一款將柔性關節驅動技術應用在服務機器人領域的產品,將全方位改善使用者的體驗,將人與機器人的配合推向了一個新的維度。